








在我國(guó)西部某礦區(qū),砂石骨料堆體規(guī)模龐大,體積測(cè)量精度直接關(guān)系到企業(yè)經(jīng)營(yíng)效益。傳統(tǒng)測(cè)量方式面臨以下挑戰(zhàn):
經(jīng)濟(jì)影響:1%的測(cè)量偏差在萬(wàn)噸級(jí)堆體中意味著千萬(wàn)元級(jí)價(jià)值損失
安全風(fēng)險(xiǎn):人工攀爬坡度達(dá)30°以上的料堆危險(xiǎn)重重
環(huán)境制約:礦區(qū)PM10濃度超500μg/m3,能見(jiàn)度不足50米,光學(xué)儀器嚴(yán)重受限
如何精準(zhǔn)測(cè)量這些龐然大物的體積,卻長(zhǎng)期困擾著礦山管理者。傳統(tǒng)人工測(cè)量耗時(shí)費(fèi)力,誤差每增加1%,就可能造成數(shù)百萬(wàn)元的經(jīng)濟(jì)損失。2025年5月,一場(chǎng)在礦區(qū)的技術(shù)革新,正悄然改變著這一局面。
礦區(qū)堆場(chǎng)沿山溝分布,地形起伏劇烈。現(xiàn)場(chǎng)環(huán)境總結(jié)如下:
堆體規(guī)模驚人:目標(biāo)堆體占地9000㎡(相當(dāng)于1.3個(gè)足球場(chǎng)),最大落差26m,體積預(yù)估超5萬(wàn)m3
粉塵濃度爆表:現(xiàn)場(chǎng)偶有卡車裝貨經(jīng)過(guò)卷起大量粉塵,破碎作業(yè)揚(yáng)塵使空氣中PM10濃度超500μg/m3
時(shí)效要求嚴(yán)苛:卡車已調(diào)度至裝運(yùn)區(qū),需2小時(shí)內(nèi)提交精確方量

現(xiàn)場(chǎng)環(huán)境

現(xiàn)場(chǎng)環(huán)境
根據(jù)客戶的現(xiàn)場(chǎng)環(huán)境情況以及作業(yè)需求,為其推薦中海達(dá)L3手持SLAM系統(tǒng),其核心技術(shù)在于將同步定位與地圖構(gòu)建(SLAM)算法與激光雷達(dá)測(cè)量技術(shù)深度耦合。這套系統(tǒng)猶如為測(cè)量裝備裝上“空間視覺(jué)”與“慣性記憶”的雙重能力。
L3手持SLAM搭載的32萬(wàn)點(diǎn)/秒激光雷達(dá)采用近紅外波長(zhǎng),其穿透粉塵能力遠(yuǎn)超可見(jiàn)光。在能見(jiàn)度降至10米以下,激光脈沖仍可抵達(dá)120m處的堆體表面并返回。沙塵粒子因其處于移動(dòng)狀態(tài),反射信號(hào)被AI動(dòng)態(tài)祛除算法自動(dòng)過(guò)濾,保障點(diǎn)云純凈度。
這套系統(tǒng)結(jié)合SLAM算法,GPS定位、慣導(dǎo)姿態(tài)糾正以及視覺(jué)輔助,在堆體遮擋環(huán)境下仍穩(wěn)定工作,解決了傳統(tǒng)移動(dòng)測(cè)量在礦區(qū)“進(jìn)得去卻出不來(lái)”(軌跡漂移)的痛點(diǎn)。
多源數(shù)據(jù)融合架構(gòu):
模塊 | 功能 | 抗干擾優(yōu)勢(shì) |
RTK定位 | 提供絕對(duì)地理坐標(biāo) | 消除軌跡累計(jì)誤差 |
激光雷達(dá) | 發(fā)射/接收激光脈沖 | 穿透粉塵、雨霧 |
慣性導(dǎo)航 | 感知加速度與角速度 | 應(yīng)對(duì)快速抖動(dòng) |
全局相機(jī) | 捕捉紋理特征 | 輔助點(diǎn)云賦色 |

中海達(dá)L3多平臺(tái)移動(dòng)測(cè)量系統(tǒng)
技術(shù)特點(diǎn):
一體化設(shè)計(jì)、自由路徑采集、無(wú)懼室內(nèi)外場(chǎng)景:
內(nèi)置GNSS、激光雷達(dá)、視覺(jué)相機(jī)和慣導(dǎo)模塊,自適應(yīng)室內(nèi)外場(chǎng)景,用戶無(wú)需反復(fù)拆卸,無(wú)需閉合掃描路線。
手機(jī)APP實(shí)時(shí)顯示全量點(diǎn)云,效果打滿:
采用激光視覺(jué)融合技術(shù),實(shí)時(shí)輸出全量點(diǎn)云成果,地物細(xì)節(jié)更豐富細(xì)膩,快速響應(yīng),輕松應(yīng)對(duì)復(fù)雜任務(wù)。
精度可見(jiàn),避免返工:
實(shí)時(shí)顯示精度熱力圖,精度燈同步顯示,精度好壞盡在掌握,避免返工。
長(zhǎng)續(xù)航,大場(chǎng)景:
單電池續(xù)航3h,結(jié)合自適應(yīng)誤差消隱技術(shù),適用于大范圍、長(zhǎng)時(shí)間作業(yè)場(chǎng)景。
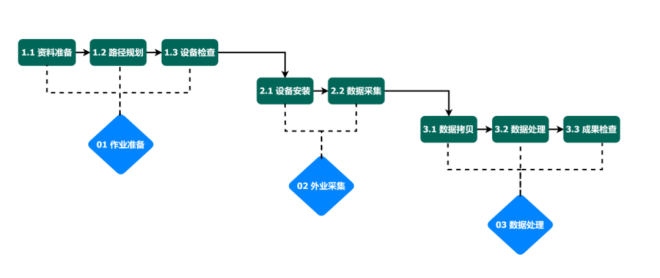
作業(yè)流程圖
1.外業(yè):18分鐘征服“塵暴”。測(cè)量員背負(fù)總重1.55kg的L3設(shè)備,沿堆體周邊行走,18分鐘完成外業(yè)數(shù)據(jù)采集。

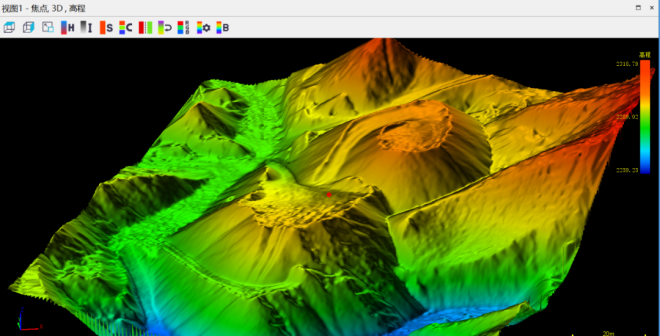
2.內(nèi)業(yè)點(diǎn)云解算:38分鐘生成真三維模型,最終輸出的點(diǎn)云模型分辨率達(dá)1cm,可清晰辨識(shí)對(duì)表面細(xì)微起伏,保證方量計(jì)算的精度。堆體邊緣30°陡坡也被完整還原,這是傳統(tǒng)單點(diǎn)測(cè)量無(wú)法捕捉的關(guān)鍵細(xì)節(jié)。
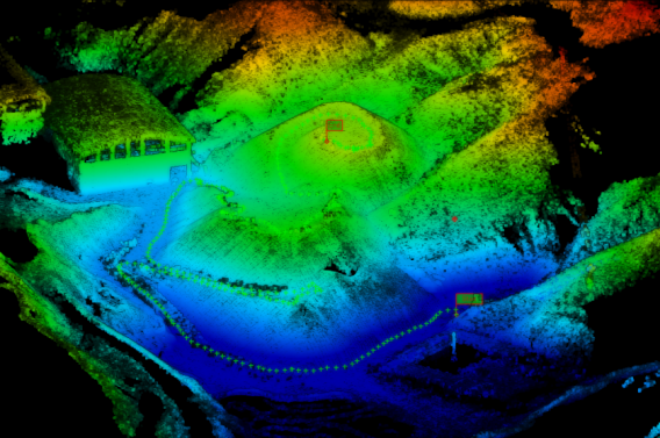
一鍵自動(dòng)解算,生成測(cè)區(qū)三維點(diǎn)云
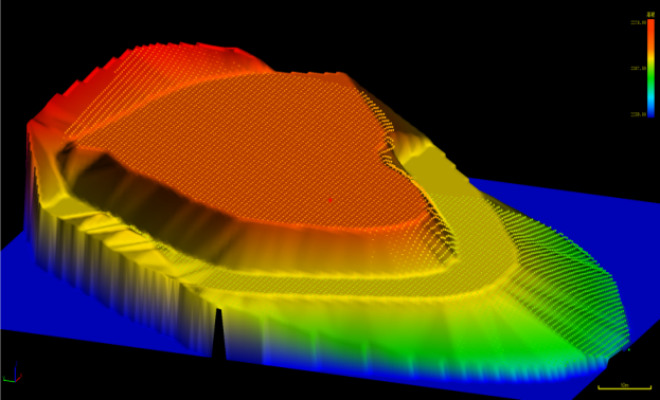
基準(zhǔn)面(根據(jù)一期數(shù)據(jù)自動(dòng)生成DEM)
3. 體積計(jì)算:劃定堆體邊界后,對(duì)原始點(diǎn)云數(shù)據(jù)進(jìn)行地面點(diǎn)分類,檢查無(wú)誤后,采用三角網(wǎng)法生成封閉曲面,積分求解空間體積。

自動(dòng)化點(diǎn)云去噪和分類界面
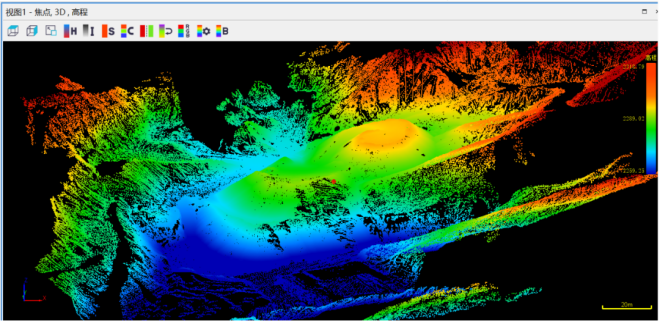
分類后地面點(diǎn)數(shù)據(jù)
通過(guò)地面點(diǎn)進(jìn)行模型恢復(fù)
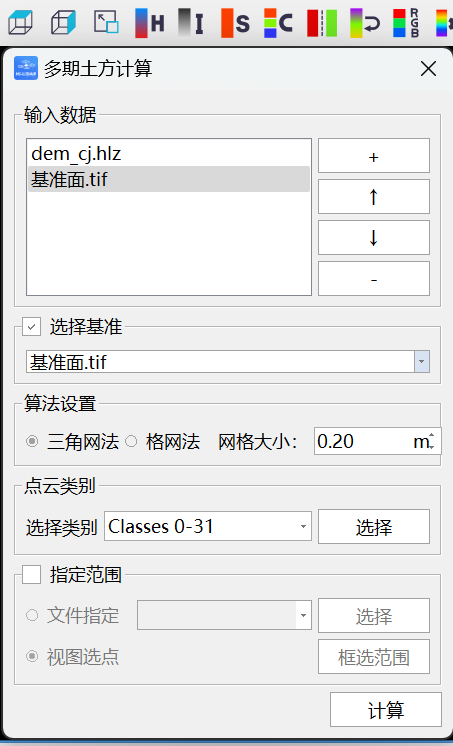
體積計(jì)算界面
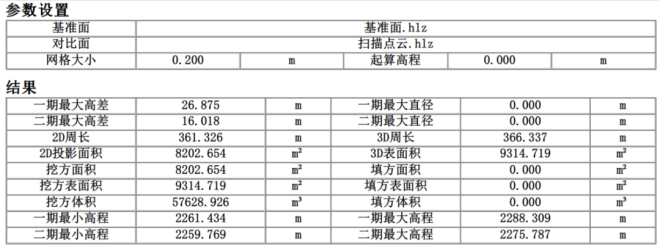
體積計(jì)算結(jié)果
本次測(cè)量計(jì)算出堆體總體積為57628.926m3。經(jīng)與載重卡車運(yùn)輸方量交叉驗(yàn)證,精度達(dá)99.2%,遠(yuǎn)超行業(yè)要求的97%標(biāo)準(zhǔn)。
效益分析
效率對(duì)比表
測(cè)量方式 | 外業(yè)時(shí)間 | 內(nèi)業(yè)時(shí)間 | 總耗時(shí) | 人員需求 |
全站儀 | 4~6小時(shí) | 2小時(shí) | >6小時(shí) | 3人 |
RTK測(cè)量 | 2~3小時(shí) | 1.5小時(shí) | >4小時(shí) | 2人 |
L3手持SLAM | 18分鐘 | 38分鐘 | <1小時(shí) | 1人 |
綜合價(jià)值
效率提升:總耗時(shí)從4-6小時(shí)縮短至56分鐘,提升6倍以上
成本降低:人員需求從2-3人減少至1人
安全增強(qiáng):避免人工攀爬危險(xiǎn)作業(yè)
決策支持:為生產(chǎn)調(diào)度、成本控制、安全管理提供精準(zhǔn)數(shù)據(jù)基礎(chǔ)
應(yīng)用前景
中海達(dá)L3手持SLAM系統(tǒng)已成為礦山堆體測(cè)量的最優(yōu)解,其優(yōu)勢(shì)體現(xiàn)在:
全場(chǎng)景自適應(yīng):從-20℃露天堆場(chǎng)到40℃封閉料倉(cāng),不受光照制約
厘米級(jí)精度保障:滿足貿(mào)易結(jié)算級(jí)需求
軟硬件深度協(xié)同:實(shí)時(shí)預(yù)覽體積,一鍵生成合規(guī)報(bào)告
生態(tài)兼容性:支持導(dǎo)入AutoCAD、Revit等設(shè)計(jì)軟件,用于場(chǎng)地規(guī)劃、安全預(yù)警、生產(chǎn)追溯
中海達(dá)L3手持SLAM系統(tǒng)在砂石礦山體積測(cè)量中的應(yīng)用,實(shí)現(xiàn)了從傳統(tǒng)人工測(cè)量到智能化精準(zhǔn)測(cè)量的技術(shù)跨越。不僅解決了礦區(qū)復(fù)雜環(huán)境下的測(cè)量難題,更為礦山數(shù)字化管理、精細(xì)化運(yùn)營(yíng)提供了可靠的技術(shù)支撐,真正讓數(shù)據(jù)成為新時(shí)代礦山最寶貴的"礦脈"。






 頂部
頂部